Reference Guide¶
Table of Contents¶
polarTransform.convertToCartesianImage(image) |
Convert polar image to cartesian image. |
polarTransform.convertToPolarImage(image[, …]) |
Convert cartesian image to polar image. |
polarTransform.getCartesianPointsImage(…) |
Convert list of polar points from image to cartesian image points based on transform metadata |
polarTransform.getPolarPointsImage(points, …) |
Convert list of cartesian points from image to polar image points based on transform metadata |
polarTransform.ImageTransform(center, …) |
Class to store settings when converting between cartesian and polar domain |
polarTransform Module¶
-
polarTransform.convertToCartesianImage(image, center=None, initialRadius=None, finalRadius=None, initialAngle=None, finalAngle=None, imageSize=None, hasColor=False, order=3, border='constant', borderVal=0.0, useMultiThreading=False, settings=None)[source]¶ Convert polar image to cartesian image.
Using a polar image, this function creates a cartesian image. This function is versatile because it can automatically calculate an appropriate cartesian image size and center given the polar image. In addition, parameters for converting to the polar domain are necessary for the conversion back to the cartesian domain.
Parameters: - image : N-dimensional
numpy.ndarray Polar image to convert to cartesian domain
Image should be structured in C-order, i.e. the axes should be ordered (…, z, theta, r, [ch]). The channel axes should only be present if
hasColorisTrue. This format is arbitrary but is selected to stay consistent with the traditional C-order representation in the Cartesian domain.In the mathematical domain, Cartesian coordinates are traditionally represented as (x, y, z) and as (r, theta, z) in the polar domain. When storing Cartesian data in C-order, the axes are usually flipped and the data is saved as (z, y, x). Thus, the polar domain coordinates are also flipped to stay consistent, hence the format (z, theta, r).
Note
For multi-dimensional images above 2D, the cartesian transformation is applied individually across each 2D slice. The last two dimensions should be the r & theta dimensions, unless
hasColoris True in which case the 2nd and 3rd to last dimensions should be. The multidimensional shape will be preserved for the resulting cartesian image (besides the polar dimensions).- center :
stror (2,)list,tupleornumpy.ndarrayofint, optional Specifies the center in the cartesian image to use as the origin in polar domain. The center in the cartesian domain will be (0, 0) in the polar domain.
If center is not set, then it will default to
middle-middle. If the image size isNone, the center is calculated after the image size is determined.For relative positioning within the image, center can be one of the string values in the table below. The quadrant column contains the visible quadrants for the given center. initialAngle and finalAngle must contain at least one of the quadrants, otherwise an error will be thrown because the resulting cartesian image is blank. An example cartesian image is given below with annotations to what the center will be given a center string.
Valid center strings¶ Value Quadrant Location in image top-left IV 1 top-middle III, IV 2 top-right III 3 middle-left I, IV 4 middle-middle I, II, III, IV 5 middle-right II, III 6 bottom-left I 7 bottom-middle I, II 8 bottom-right II 9 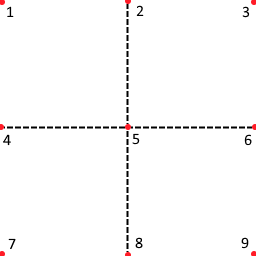
- initialRadius :
int, optional Starting radius in pixels from the center of the cartesian image in the polar image
The polar image begins at this radius, i.e. the first row of the polar image corresponds to this starting radius.
If initialRadius is not set, then it will default to
0.- finalRadius :
int, optional Final radius in pixels from the center of the cartesian image in the polar image
The polar image ends at this radius, i.e. the last row of the polar image corresponds to this ending radius.
Note
The polar image does not include this radius. It includes all radii starting from initial to final radii excluding the final radius. Rather, it will stop one step size before the final radius. Assuming the radial resolution (see
radiusSize) is small enough, this should not matter.If finalRadius is not set, then it will default to the maximum radius which is the size of the radial (1st) dimension of the polar image.
- initialAngle :
float, optional Starting angle in radians in the polar image
The polar image begins at this angle, i.e. the first column of the polar image corresponds to this starting angle.
Radian angle is with respect to the x-axis and rotates counter-clockwise. The angle should be in the range of 0 to \(2\pi\).
If initialAngle is not set, then it will default to
0.0.- finalAngle :
float, optional Final angle in radians in the polar image
The polar image ends at this angle, i.e. the last column of the polar image corresponds to this ending angle.
Note
The polar image does not include this angle. It includes all angles starting from initial to final angle excluding the final angle. Rather, it stops one step size before the final angle. Assuming the angular resolution (see
angleSize) is small enough, this should not matter.Radian angle is with respect to the x-axis and rotates counter-clockwise. The angle should be in the range of 0 to \(2\pi\).
If finalAngle is not set, then it will default to \(2\pi\).
- imageSize : (2,)
list,tupleornumpy.ndarrayofint, optional Desired size of cartesian image where 1st dimension is number of rows and 2nd dimension is number of columns
If imageSize is not set, then it defaults to the size required to fit the entire polar image on a cartesian image.
- hasColor :
bool, optional Whether or not the polar image contains color channels
This means that the image is structured as (…, y, x, ch) or (…, theta, r, ch) for Cartesian or polar images, respectively. If color channels are present, the last dimension (channel axes) will be shifted to the front, converted and then shifted back to its original location.
Default is
FalseNote
If an alpha band (4th channel of image is present), then it will be converted. Typically, this is unwanted, so the recommended solution is to transform the first 3 channels and set the 4th channel to fully on.
- order :
int(0-5), optional The order of the spline interpolation, default is 3. The order has to be in the range 0-5.
The following orders have special names:
- 0 - nearest neighbor
- 1 - bilinear
- 3 - bicubic
- border : {‘constant’, ‘nearest’, ‘wrap’, ‘reflect’}, optional
Polar points outside the cartesian image boundaries are filled according to the given mode.
Default is ‘constant’
The following table describes the mode and expected output when seeking past the boundaries. The input column is the 1D input array whilst the extended columns on either side of the input array correspond to the expected values for the given mode if one extends past the boundaries.
Valid border modes and expected output¶ Mode Ext. Input Ext. mirror 4 3 2 1 2 3 4 5 6 7 8 7 6 5 reflect 3 2 1 1 2 3 4 5 6 7 8 8 7 6 nearest 1 1 1 1 2 3 4 5 6 7 8 8 8 8 constant 0 0 0 1 2 3 4 5 6 7 8 0 0 0 wrap 6 7 8 1 2 3 4 5 6 7 8 1 2 3 Refer to
scipy.ndimage.map_coordinates()for more details on this argument.- borderVal : same datatype as
image, optional Value used for polar points outside the cartesian image boundaries if
border= ‘constant’.Default is 0.0
- useMultiThreading :
bool, optional Whether to use multithreading when applying transformation for 3D images. This considerably speeds up the execution time for large images but adds overhead for smaller 3D images.
Default is
False- settings :
ImageTransform, optional Contains metadata for conversion between polar and cartesian image.
Settings contains many of the arguments in
convertToPolarImage()andconvertToCartesianImage()and provides an easy way of passing these parameters along without having to specify them all again.Warning
Cleaner and more succint to use
ImageTransform.convertToCartesianImage()If settings is not specified, then the other arguments are used in this function and the defaults will be calculated if necessary. If settings is given, then the values from settings will be used.
Returns: - cartesianImage : N-dimensional
numpy.ndarray Cartesian image
Resulting image is structured in C-order, i.e. the axes are ordered as (…, z, y, x, [ch]). This format is the traditional method of storing image data in Python.
Resulting image shape will be the same as the input image except for the polar dimensions are replaced with the Cartesian dimensions.
- settings :
ImageTransform Contains metadata for conversion between polar and cartesian image.
Settings contains many of the arguments in
convertToPolarImage()andconvertToCartesianImage()and provides an easy way of passing these parameters along without having to specify them all again.
- image : N-dimensional
-
polarTransform.convertToPolarImage(image, center=None, initialRadius=None, finalRadius=None, initialAngle=None, finalAngle=None, radiusSize=None, angleSize=None, hasColor=False, order=3, border='constant', borderVal=0.0, useMultiThreading=False, settings=None)[source]¶ Convert cartesian image to polar image.
Using a cartesian image, this function creates a polar domain image where the first dimension is radius and second dimension is the angle. This function is versatile because it allows different starting and stopping radii and angles to extract the polar region you are interested in.
Note
Traditionally images are loaded such that the origin is in the upper-left hand corner. In these cases the
initialAngleandfinalAnglewill rotate clockwise from the x-axis. For simplicitly, it is recommended to flip the image along first dimension before passing to this function.Parameters: - image : N-dimensional
numpy.ndarray Cartesian image to convert to polar domain
Image should be structured in C-order, i.e. the axes should be ordered as (…, z, y, x, [ch]). This format is the traditional method of storing image data in Python.
Note
For multi-dimensional images above 2D, the polar transformation is applied individually across each 2D slice. The last two dimensions should be the x & y dimensions, unless
hasColoris True in which case the 2nd and 3rd to last dimensions should be. The multidimensional shape will be preserved for the resulting polar image (besides the Cartesian dimensions).- center : (2,)
list,tupleornumpy.ndarrayofint, optional Specifies the center in the cartesian image to use as the origin in polar domain. The center in the cartesian domain will be (0, 0) in the polar domain.
The center is structured as (x, y) where the first item is the x-coordinate and second item is the y-coordinate.
If center is not set, then it will default to
round(image.shape[::-1] / 2).- initialRadius :
int, optional Starting radius in pixels from the center of the cartesian image that will appear in the polar image
The polar image will begin at this radius, i.e. the first row of the polar image will correspond to this starting radius.
If initialRadius is not set, then it will default to
0.- finalRadius :
int, optional Final radius in pixels from the center of the cartesian image that will appear in the polar image
The polar image will end at this radius, i.e. the last row of the polar image will correspond to this ending radius.
Note
The polar image will not include this radius. It will include all radii starting from initial to final radii excluding the final radius. Rather, it will stop one step size before the final radius. Assuming the radial resolution (see
radiusSize) is small enough, this should not matter.If finalRadius is not set, then it will default to the maximum radius of the cartesian image. Using the furthest corner from the center, the finalRadius can be calculated as:
\[finalRadius = \sqrt{((X_{max} - X_{center})^2 + (Y_{max} - Y_{center})^2)}\]- initialAngle :
float, optional Starting angle in radians that will appear in the polar image
The polar image will begin at this angle, i.e. the first column of the polar image will correspond to this starting angle.
Radian angle is with respect to the x-axis and rotates counter-clockwise. The angle should be in the range of 0 to \(2\pi\).
If initialAngle is not set, then it will default to
0.0.- finalAngle :
float, optional Final angle in radians that will appear in the polar image
The polar image will end at this angle, i.e. the last column of the polar image will correspond to this ending angle.
Note
The polar image will not include this angle. It will include all angle starting from initial to final angle excluding the final angle. Rather, it will stop one step size before the final angle. Assuming the angular resolution (see
angleSize) is small enough, this should not matter.Radian angle is with respect to the x-axis and rotates counter-clockwise. The angle should be in the range of 0 to \(2\pi\).
If finalAngle is not set, then it will default to \(2\pi\).
- radiusSize :
int, optional Size of polar image for radial (1st) dimension
This in effect determines the resolution of the radial dimension of the polar image based on the
initialRadiusandfinalRadius. Resolution can be calculated using equation below in radial px per cartesian px:\[radialResolution = \frac{radiusSize}{finalRadius - initialRadius}\]If radiusSize is not set, then it will default to the minimum size necessary to ensure that image information is not lost in the transformation. The minimum resolution necessary can be found by finding the smallest change in radius from two connected pixels in the cartesian image. Through experimentation, there is a surprisingly close relationship between the maximum difference from width or height of the cartesian image to the
centertimes two.The radiusSize is calculated based on this relationship and is proportional to the
initialRadiusandfinalRadiusgiven.- angleSize :
int, optional Size of polar image for angular (2nd) dimension
This in effect determines the resolution of the angular dimension of the polar image based on the
initialAngleandfinalAngle. Resolution can be calculated using equation below in angular px per cartesian px:\[angularResolution = \frac{angleSize}{finalAngle - initialAngle}\]If angleSize is not set, then it will default to the minimum size necessary to ensure that image information is not lost in the transformation. The minimum resolution necessary can be found by finding the smallest change in angle from two connected pixels in the cartesian image.
For a cartesian image with either dimension greater than 500px, the angleSize is set to be two times larger than the largest dimension proportional to
initialAngleandfinalAngle. Otherwise, for a cartesian image with both dimensions less than 500px, the angleSize is set to be four times larger the largest dimension proportional toinitialAngleandfinalAngle.Note
The above logic estimates the necessary angleSize to reduce image information loss. No algorithm currently exists for determining the required angleSize.
- hasColor :
bool, optional Whether or not the cartesian image contains color channels
This means that the image is structured as (…, y, x, ch) or (…, theta, r, ch) for Cartesian or polar images, respectively. If color channels are present, the last dimension (channel axes) will be shifted to the front, converted and then shifted back to its original location.
Default is
FalseNote
If an alpha band (4th channel of image is present), then it will be converted. Typically, this is unwanted, so the recommended solution is to transform the first 3 channels and set the 4th channel to fully on.
- order :
int(0-5), optional The order of the spline interpolation, default is 3. The order has to be in the range 0-5.
The following orders have special names:
- 0 - nearest neighbor
- 1 - bilinear
- 3 - bicubic
- border : {‘constant’, ‘nearest’, ‘wrap’, ‘reflect’}, optional
Polar points outside the cartesian image boundaries are filled according to the given mode.
Default is ‘constant’
The following table describes the mode and expected output when seeking past the boundaries. The input column is the 1D input array whilst the extended columns on either side of the input array correspond to the expected values for the given mode if one extends past the boundaries.
Valid border modes and expected output¶ Mode Ext. Input Ext. mirror 4 3 2 1 2 3 4 5 6 7 8 7 6 5 reflect 3 2 1 1 2 3 4 5 6 7 8 8 7 6 nearest 1 1 1 1 2 3 4 5 6 7 8 8 8 8 constant 0 0 0 1 2 3 4 5 6 7 8 0 0 0 wrap 6 7 8 1 2 3 4 5 6 7 8 1 2 3 Refer to
scipy.ndimage.map_coordinates()for more details on this argument.- borderVal : same datatype as
image, optional Value used for polar points outside the cartesian image boundaries if
border= ‘constant’.Default is 0.0
- useMultiThreading :
bool, optional Whether to use multithreading when applying transformation for 3D images. This considerably speeds up the execution time for large images but adds overhead for smaller 3D images.
Default is
False- settings :
ImageTransform, optional Contains metadata for conversion between polar and cartesian image.
Settings contains many of the arguments in
convertToPolarImage()andconvertToCartesianImage()and provides an easy way of passing these parameters along without having to specify them all again.Warning
Cleaner and more succint to use
ImageTransform.convertToPolarImage()If settings is not specified, then the other arguments are used in this function and the defaults will be calculated if necessary. If settings is given, then the values from settings will be used.
Returns: - polarImage : N-dimensional
numpy.ndarray Polar image
Resulting image is structured in C-order, i.e. the axes are be ordered as (…, z, theta, r, [ch]) depending on if the input image was 3D. This format is arbitrary but is selected to stay consistent with the traditional C-order representation in the Cartesian domain.
In the mathematical domain, Cartesian coordinates are traditionally represented as (x, y, z) and as (r, theta, z) in the polar domain. When storing Cartesian data in C-order, the axes are usually flipped and the data is saved as (z, y, x). Thus, the polar domain coordinates are also flipped to stay consistent, hence the format (z, theta, r).
Resulting image shape will be the same as the input image except for the Cartesian dimensions are replaced with the polar dimensions.
- settings :
ImageTransform Contains metadata for conversion between polar and cartesian image.
Settings contains many of the arguments in
convertToPolarImage()andconvertToCartesianImage()and provides an easy way of passing these parameters along without having to specify them all again.
- image : N-dimensional
-
class
polarTransform.ImageTransform(center, initialRadius, finalRadius, initialAngle, finalAngle, cartesianImageSize, polarImageSize, hasColor)[source]¶ Class to store settings when converting between cartesian and polar domain
-
convertToCartesianImage(image, order=3, border='constant', borderVal=0.0, useMultiThreading=False)[source]¶ Convert polar image to cartesian image.
Using a polar image, this function creates a cartesian image. This function is versatile because it can automatically calculate an appropiate cartesian image size and center given the polar image. In addition, parameters for converting to the polar domain are necessary for the conversion back to the cartesian domain.
Parameters: - image : N-dimensional
numpy.ndarray Polar image to convert to cartesian domain
Image should be structured in C-order, i.e. the axes should be ordered (…, z, theta, r, [ch]). The channel axes should only be present if
hasColorisTrue. This format is arbitrary but is selected to stay consistent with the traditional C-order representation in the Cartesian domain.In the mathematical domain, Cartesian coordinates are traditionally represented as (x, y, z) and as (r, theta, z) in the polar domain. When storing Cartesian data in C-order, the axes are usually flipped and the data is saved as (z, y, x). Thus, the polar domain coordinates are also flipped to stay consistent, hence the format (z, theta, r).
Note
For multi-dimensional images above 2D, the cartesian transformation is applied individually across each 2D slice. The last two dimensions should be the r & theta dimensions, unless
hasColoris True in which case the 2nd and 3rd to last dimensions should be. The multidimensional shape will be preserved for the resulting cartesian image (besides the polar dimensions).- order :
int(0-5), optional The order of the spline interpolation, default is 3. The order has to be in the range 0-5.
The following orders have special names:
- 0 - nearest neighbor
- 1 - bilinear
- 3 - bicubic
- border : {‘constant’, ‘nearest’, ‘wrap’, ‘reflect’}, optional
Polar points outside the cartesian image boundaries are filled according to the given mode.
Default is ‘constant’
The following table describes the mode and expected output when seeking past the boundaries. The input column is the 1D input array whilst the extended columns on either side of the input array correspond to the expected values for the given mode if one extends past the boundaries.
Valid border modes and expected output¶ Mode Ext. Input Ext. mirror 4 3 2 1 2 3 4 5 6 7 8 7 6 5 reflect 3 2 1 1 2 3 4 5 6 7 8 8 7 6 nearest 1 1 1 1 2 3 4 5 6 7 8 8 8 8 constant 0 0 0 1 2 3 4 5 6 7 8 0 0 0 wrap 6 7 8 1 2 3 4 5 6 7 8 1 2 3 Refer to
scipy.ndimage.map_coordinates()for more details on this argument.- borderVal : same datatype as
image, optional Value used for polar points outside the cartesian image boundaries if
border= ‘constant’.Default is 0.0
- useMultiThreading :
bool, optional Whether to use multithreading when applying transformation for 3D images. This considerably speeds up the execution time for large images but adds overhead for smaller 3D images.
Default is
False
Returns: - cartesianImage : N-dimensional
numpy.ndarray Cartesian image
Resulting image is structured in C-order, i.e. the axes are ordered as (…, z, y, x, [ch]). This format is the traditional method of storing image data in Python.
Resulting image shape will be the same as the input image except for the polar dimensions are replaced with the Cartesian dimensions.
See also
- image : N-dimensional
-
convertToPolarImage(image, order=3, border='constant', borderVal=0.0, useMultiThreading=False)[source]¶ Convert cartesian image to polar image.
Using a cartesian image, this function creates a polar domain image where the first dimension is radius and second dimension is the angle. This function is versatile because it allows different starting and stopping radii and angles to extract the polar region you are interested in.
Note
Traditionally images are loaded such that the origin is in the upper-left hand corner. In these cases the
initialAngleandfinalAnglewill rotate clockwise from the x-axis. For simplicitly, it is recommended to flip the image along first dimension before passing to this function.Parameters: - image : N-dimensional
numpy.ndarray Cartesian image to convert to polar domain
Image should be structured in C-order, i.e. the axes should be ordered as (…, z, y, x, [ch]). This format is the traditional method of storing image data in Python.
Note
For multi-dimensional images above 2D, the polar transformation is applied individually across each 2D slice. The last two dimensions should be the x & y dimensions, unless
hasColoris True in which case the 2nd and 3rd to last dimensions should be. The multidimensional shape will be preserved for the resulting polar image (besides the Cartesian dimensions).- order :
int(0-5), optional The order of the spline interpolation, default is 3. The order has to be in the range 0-5.
The following orders have special names:
- 0 - nearest neighbor
- 1 - bilinear
- 3 - bicubic
- border : {‘constant’, ‘nearest’, ‘wrap’, ‘reflect’}, optional
Polar points outside the cartesian image boundaries are filled according to the given mode.
Default is ‘constant’
The following table describes the mode and expected output when seeking past the boundaries. The input column is the 1D input array whilst the extended columns on either side of the input array correspond to the expected values for the given mode if one extends past the boundaries.
Valid border modes and expected output¶ Mode Ext. Input Ext. mirror 4 3 2 1 2 3 4 5 6 7 8 7 6 5 reflect 3 2 1 1 2 3 4 5 6 7 8 8 7 6 nearest 1 1 1 1 2 3 4 5 6 7 8 8 8 8 constant 0 0 0 1 2 3 4 5 6 7 8 0 0 0 wrap 6 7 8 1 2 3 4 5 6 7 8 1 2 3 Refer to
scipy.ndimage.map_coordinates()for more details on this argument.- borderVal : same datatype as
image, optional Value used for polar points outside the cartesian image boundaries if
border= ‘constant’.Default is 0.0
Returns: - polarImage : N-dimensional
numpy.ndarray Polar image
Resulting image is structured in C-order, i.e. the axes are be ordered as (…, z, theta, r, [ch]) depending on if the input image was 3D. This format is arbitrary but is selected to stay consistent with the traditional C-order representation in the Cartesian domain.
In the mathematical domain, Cartesian coordinates are traditionally represented as (x, y, z) and as (r, theta, z) in the polar domain. When storing Cartesian data in C-order, the axes are usually flipped and the data is saved as (z, y, x). Thus, the polar domain coordinates are also flipped to stay consistent, hence the format (z, theta, r).
Resulting image shape will be the same as the input image except for the Cartesian dimensions are replaced with the polar dimensions.
- image : N-dimensional
-
getCartesianPointsImage(points)[source]¶ Convert list of polar points from image to cartesian image points based on transform metadata
Note
This does not convert from polar to cartesian points, but rather converts pixels from polar image to pixels from cartesian image using
ImageTransform.The returned points are not rounded to the nearest point. User must do that by hand if desired.
Parameters: - points : (N, 2) or (2,)
numpy.ndarray List of polar points to convert to cartesian domain
First column is r and second column is theta
Returns: - cartesianPoints : (N, 2) or (2,)
numpy.ndarray Corresponding cartesian points from polar
pointsusingImageTransform
See also
getCartesianPointsImage(),getCartesianPoints(),getCartesianPoints2()- points : (N, 2) or (2,)
-
getPolarPointsImage(points)[source]¶ Convert list of cartesian points from image to polar image points based on transform metadata
Note
This does not convert from cartesian to polar points, but rather converts pixels from cartesian image to pixels from polar image using
ImageTransform.The returned points are not rounded to the nearest point. User must do that by hand if desired.
Parameters: - points : (N, 2) or (2,)
numpy.ndarray List of cartesian points to convert to polar domain
First column is x and second column is y
Returns: - polarPoints : (N, 2) or (2,)
numpy.ndarray Corresponding polar points from cartesian
pointsusingImageTransform
See also
getPolarPointsImage(),getPolarPoints(),getPolarPoints2()- points : (N, 2) or (2,)
-
-
polarTransform.getCartesianPointsImage(points, settings)[source]¶ Convert list of polar points from image to cartesian image points based on transform metadata
Warning
Cleaner and more succinct to use
ImageTransform.getCartesianPointsImage()Note
This does not convert from polar to cartesian points, but rather converts pixels from polar image to pixels from cartesian image using
ImageTransform.The returned points are not rounded to the nearest point. User must do that by hand if desired.
Parameters: - points : (N, 2) or (2,)
numpy.ndarray List of polar points to convert to cartesian domain
First column is r and second column is theta
- settings :
ImageTransform Contains metadata for conversion from polar to cartesian domain
Settings contains many of the arguments in
convertToPolarImage()andconvertToCartesianImage()and provides an easy way of passing these parameters along without having to specify them all again.
Returns: - cartesianPoints : (N, 2) or (2,)
numpy.ndarray Corresponding cartesian points from polar
pointsusingsettings
See also
ImageTransform.getCartesianPointsImage(),getCartesianPoints(),getCartesianPoints2()- points : (N, 2) or (2,)